Deterministic Safety Infrastructure for Human - AI Interaction
A verifiable sidecar that enforces runtime safety constraints over AI systems interacting with human decision-makers.
THE PROBLEM
Why probabilistic AI safety breaks down in real world use
Advanced AI systems are increasingly deployed inside real-time human decision loops - assistants, agents, copilots, and automated workflows.
In these settings, failure is rarely about content alone. It is about trajectory: systems unintentionally accelerating users toward cognitive overload, impulsive action, or destabilisation.
Existing safety approaches struggle because:
Alignment is probabilistic and degrades out of distribution
Human in the loop review is too slow for high-velocity interaction
There is no enforceable boundary once overload begins
For safety critical human interaction, probability of safety is not enough.
*Safety at interaction speed is a control problem, not a moderation problem.
The Compass Governor Architecture
Compass Governor operates as a deterministic safety sidecar. It does not attempt to make models “behave better.” Instead, it constrains what systems are allowed to do - in real time.
State Inference Engine Maps interaction signals (velocity, load, risk markers) to discrete safety states (GREEN / AMBER / RED)
Versioned Safety Specification Defines explicit constraints on system behaviour per state
Deterministic Gatekeeper Intercepts every candidate action and enforces PASS or BLOCK with verified fallbacks
Fail-Safe by Design Safety holds even if the underlying model hallucinates or drifts
Evidence from the Pathfinder Research Lab
All screenshots captured from a live internal deployment ( Compass Governor/Pathfinder Lab). No mock data.
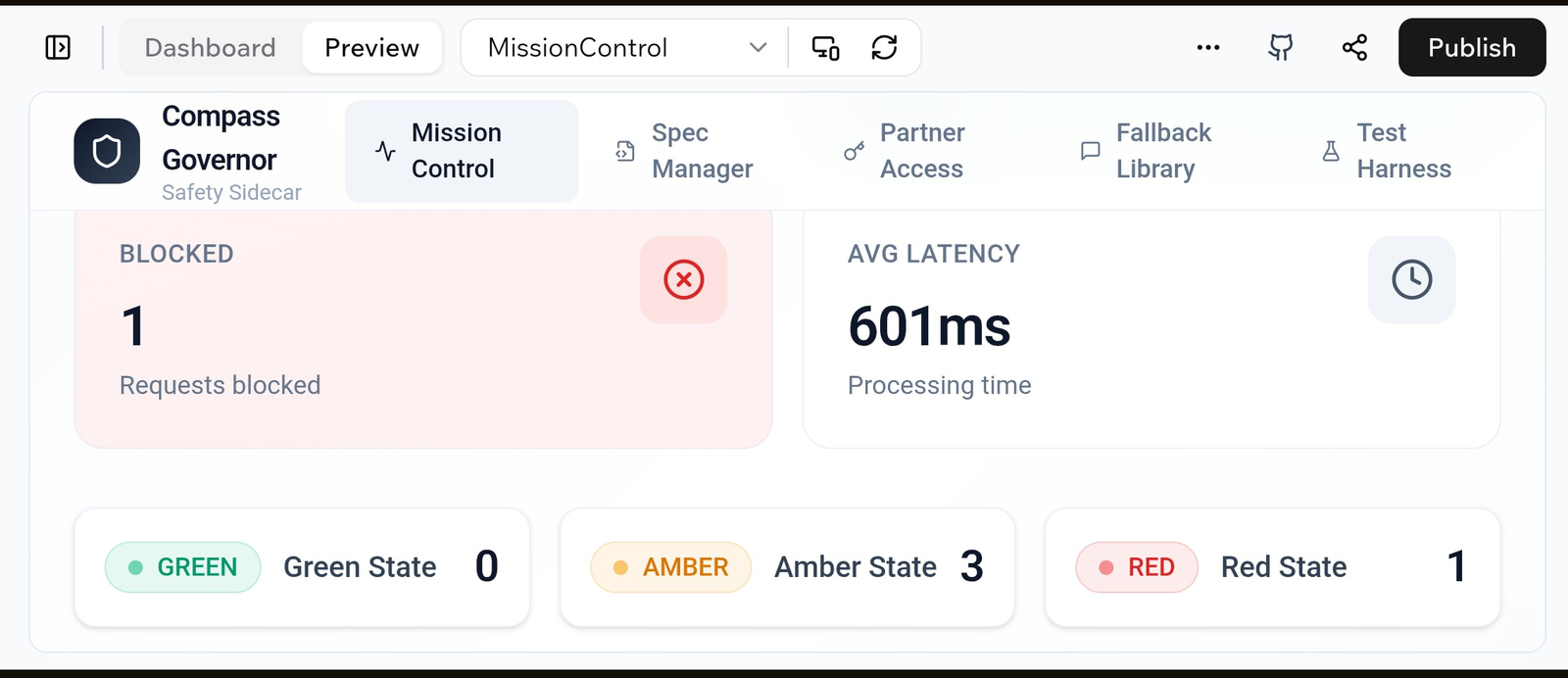

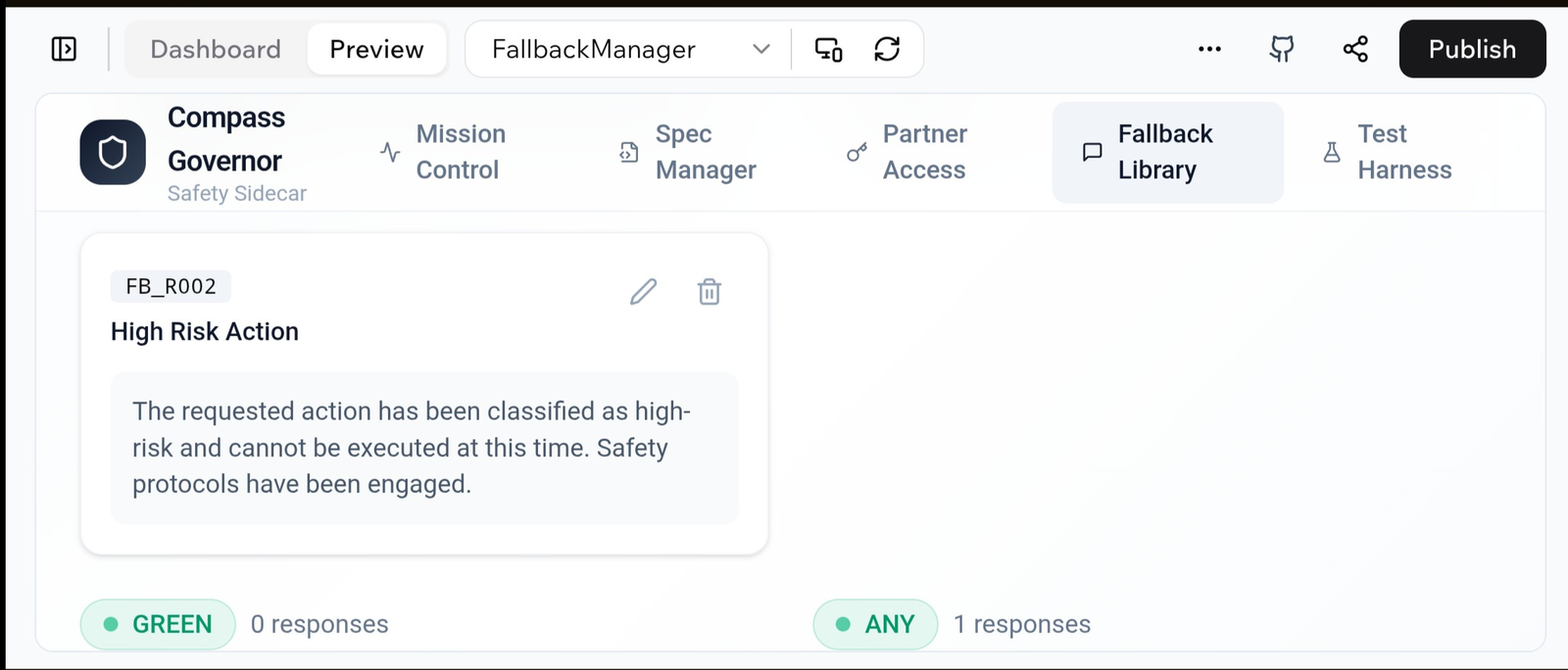
Runtime Enforcement: High-risk action blocked when RED state is detected
Mission Control: An audit-ready logging architecture designed to support independent verification and external review
Glass-Box Trace: Rule ID and spec version recorded for every decision
*This logging architecture is designed to support future independent audits and external verification, rather than asserting completed certification.
Integration
Compass Governor runs as a standard REST sidecar API.
No model retraining required
No changes to existing inference stacks
Compatible with agentic and tool-using systems
Designed for real-time human interaction loops
Typical latency: ~600ms per evaluation.
Research & Governance
Compass Governor is currently deployed in an internal research environment for adversarial testing and verification.
Access is provided to qualified partners, reviewers, and institutions for inspection and evaluation.
.