Compass Governor - Deterministic Safety Sidecar
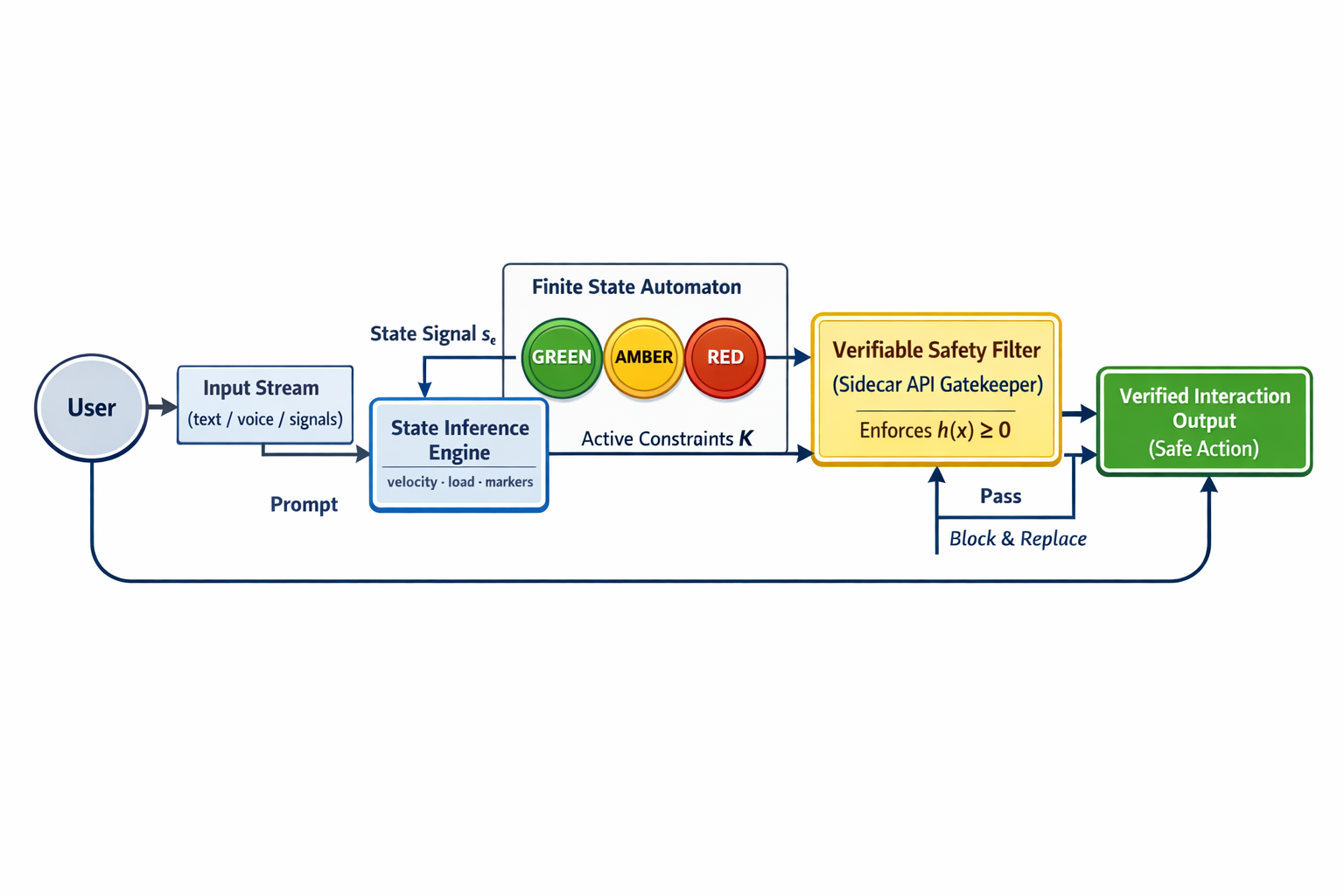
Compass Governor operates as a deterministic safety sidecar. It models human-AI interaction as a finite state system and enforces explicit runtime constraints on AI actuation. Safety is enforced independently of model alignment.
How the state machine works
GREEN - Normal operation
AMBER - Throttling / constrained output
RED - Circuit breaker active, high-risk actions blocked deterministically
POST /evaluate { "input": "Proposed agent action", "context": { "velocity": 120, "risk_score": 0.85 } }
{ "decision": "BLOCK", "state": "RED", "trace_id": "tr_x92f...", "spec_version": "v1.0" }
View Research Lab (Pathfinder)
<